Janert - Feedback Control for Computer Systems
books, computers, control theory
Chapter 1 - Why Feedback
- Sets up the book, motivates with reasons to establish control for queues
- interesting counterpart to queueing theory, where we’d traditionally model stuff as a feedforward system
- Funny this book was written before Kubernetes, which was most people’s introduction into a feedback system
Chapter 2 - Feedback Systems
- Notes that you need to track amount of corrective action taken
- Applying large control actions but need to avoid oscillatory behavior and kicking the system out of a stable state
- states that the big 3 are: stability, performance, accuracy
- a lot is buried in accuracy though, since there’s a tension between waiting the right amount of time for accurate data and being too slow to take corrective action (Spanner query retries, for example, sets a max wait time by waiting on epsilson)
Chapter 3 - System Dynamics
- Contrasts lag with delay
- Also mentions that computer systems can arbitrary change internal state, which is true but with a caveat
- Distributed systems tend to flow from known state to a known state, as multiple nodes typically need to coordinate to move states. A malfunctioning node just gets kicked out of the Paxos quorum, but the real disaster is SDC where multiple nodes agree on an invalid state.
- Invariant checks are necessary for this, which also reduce the “arbitraryness” of computer programs
- Distributed systems tend to flow from known state to a known state, as multiple nodes typically need to coordinate to move states. A malfunctioning node just gets kicked out of the Paxos quorum, but the real disaster is SDC where multiple nodes agree on an invalid state.
- Forced response - pot heating up as the stove is turned on
- Free response - the system returning to a natural state
- Importance of lags and delays
- a lag is defined as a rounded, partial response
- a delay is a response with a wait time
- He’s mostly establishing the basis for hystersis loop
- This chapter largely attempts to model what initiates and what knocks systems out of hystersis
Chapter 4 - Controllers
- Finally getting to PID controllers
- Makes the important point that open loops need to be much more complex than closed loops, as feedback is not immediate.
- Components in open loop systems, by default, tend to be more stateful, as they need to maintain internal memory
- Components in closed loop systems can afford to be stateless, as modified state is eventually flowed back somehow
- Porportional - we need to adjust our response in line with how far we’ve drifted, scalar
- Integral - response must be adjusted to culumative error, which eliminates for steady state error
- Derivative - improves overshoot, which responds to the rate of change in the error
import matplotlib.pyplot as plt
class PidController:
def __init__(self, kp, ki, kd=0):
self.kp, self.ki, self.kd = kp, ki, kd
self.i = 0
self.d = 0
self.prev = 0
def work(self, e, dt):
self.i += dt * e
self.d = (e - self.prev) / dt
self.prev = e
return self.kp * e + self.ki * self.i + self.kd * self.d
def pid_simulation(setpoint, initial_value, kp, ki, kd, time_steps, dt):
"""Simulates PID control and returns the response."""
controller = PidController(kp, ki, kd)
value = initial_value
values = [value]
time = [0.0] # Start time at 0.0
for step in range(1, time_steps):
error = setpoint - value
output = controller.work(error, dt)
value += output * 0.1 # Simulate plant response
values.append(value)
time.append(time[-1] + dt)
return time, values
# Simulation parameters
setpoint = 100
initial_value = 50
time_steps = 100
dt = 0.1 # Time step
# P control
time_p, values_p = pid_simulation(setpoint, initial_value, kp=0.5, ki=0, kd=0, time_steps=time_steps, dt=dt)
# I control
time_i, values_i = pid_simulation(setpoint, initial_value, kp=0, ki=0.01, kd=0, time_steps=time_steps, dt=dt)
# D control (with some P to show damping)
time_d, values_d = pid_simulation(setpoint, initial_value, kp=0.5, ki=0, kd=0.1, time_steps=time_steps, dt=dt)
# PID control
time_pid, values_pid = pid_simulation(setpoint, initial_value, kp=0.5, ki=0.01, kd=0.1, time_steps=time_steps, dt=dt)
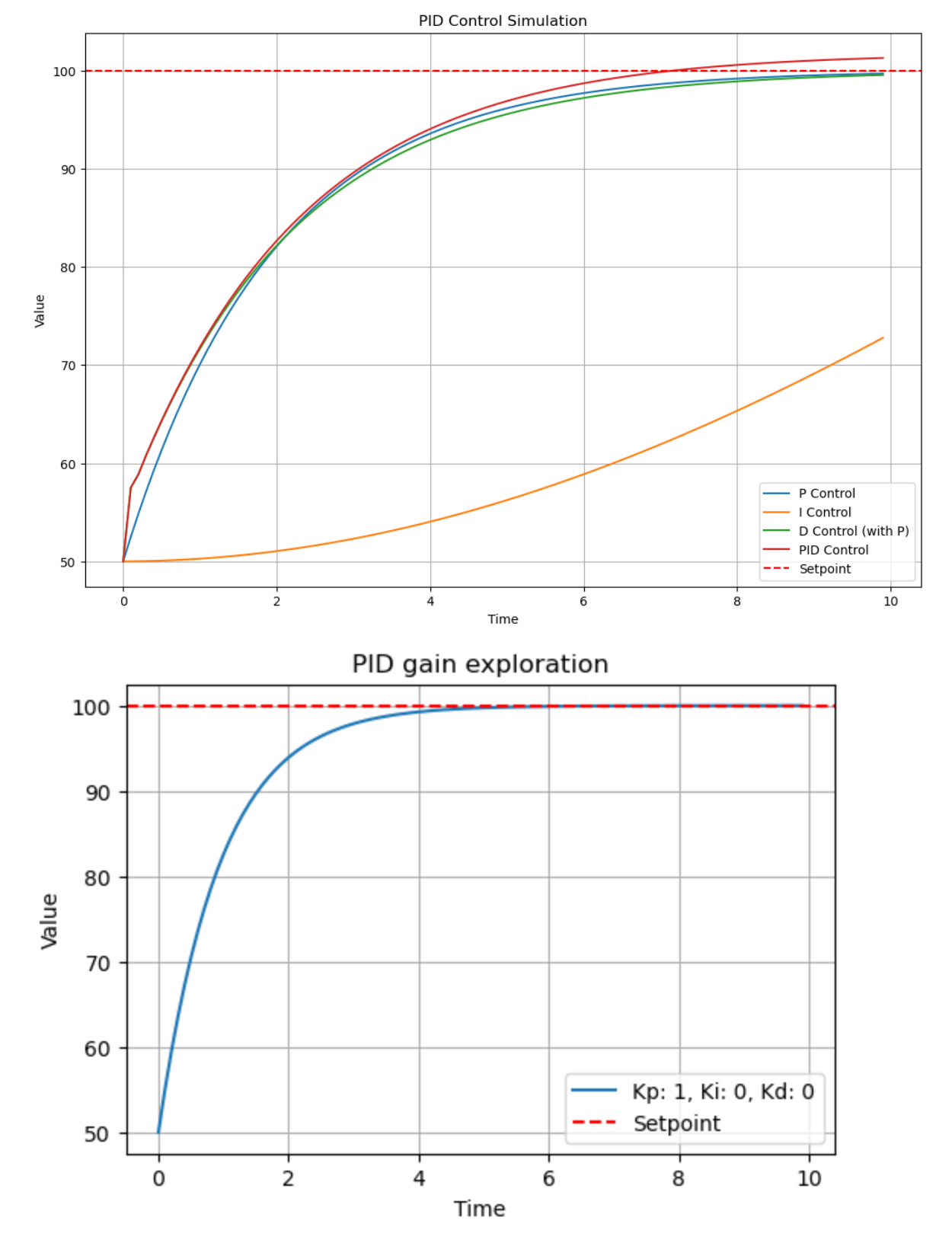
# Plotting
plt.figure(figsize=(12, 8))
plt.plot(time_p, values_p, label="P Control")
plt.plot(time_i, values_i, label="I Control")
plt.plot(time_d, values_d, label="D Control (with P)")
plt.plot(time_pid, values_pid, label="PID Control")
plt.axhline(y=setpoint, color='r', linestyle='--', label="Setpoint")
plt.xlabel("Time")
plt.ylabel("Value")
plt.title("PID Control Simulation")
plt.legend()
plt.grid(True)
plt.show()
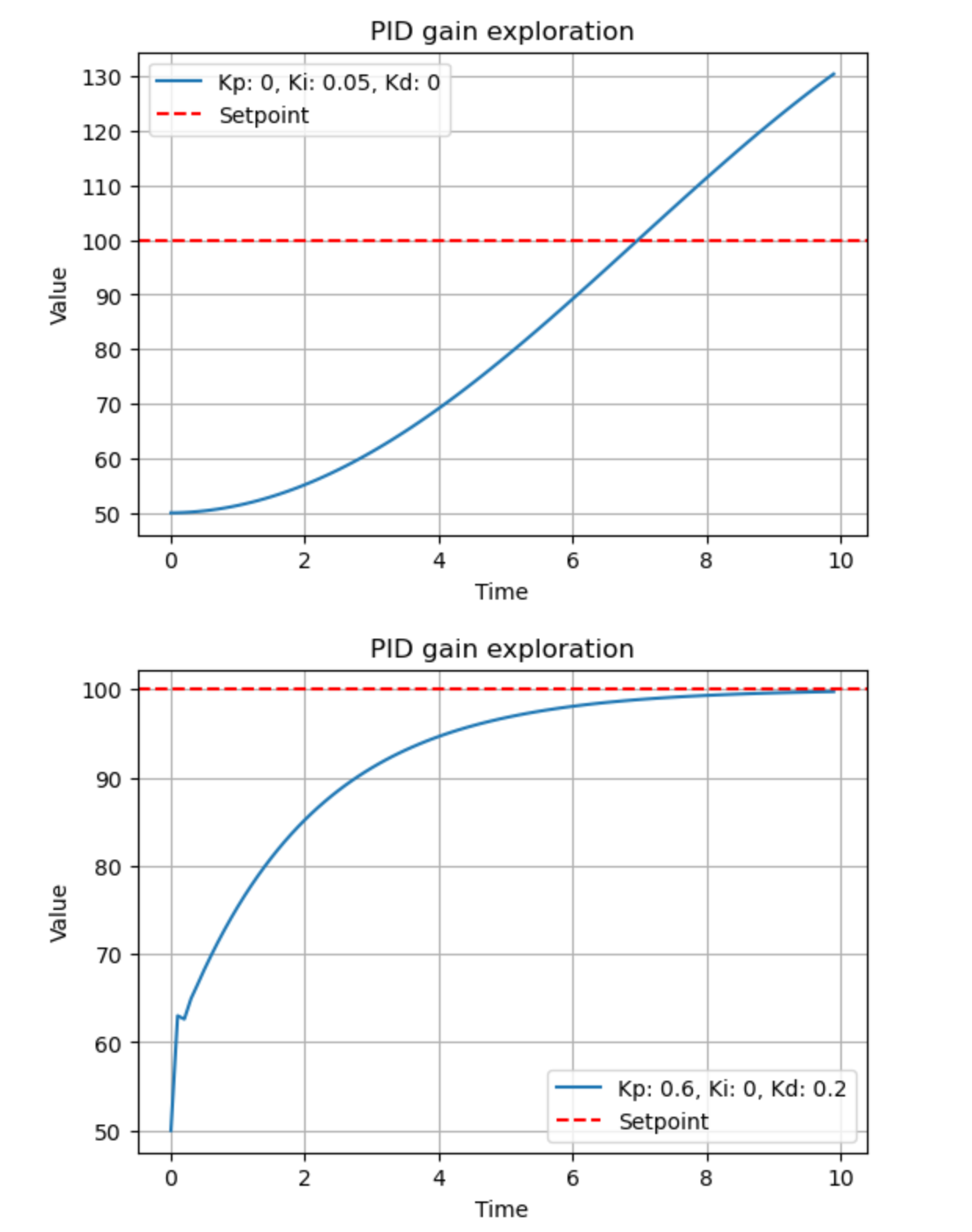
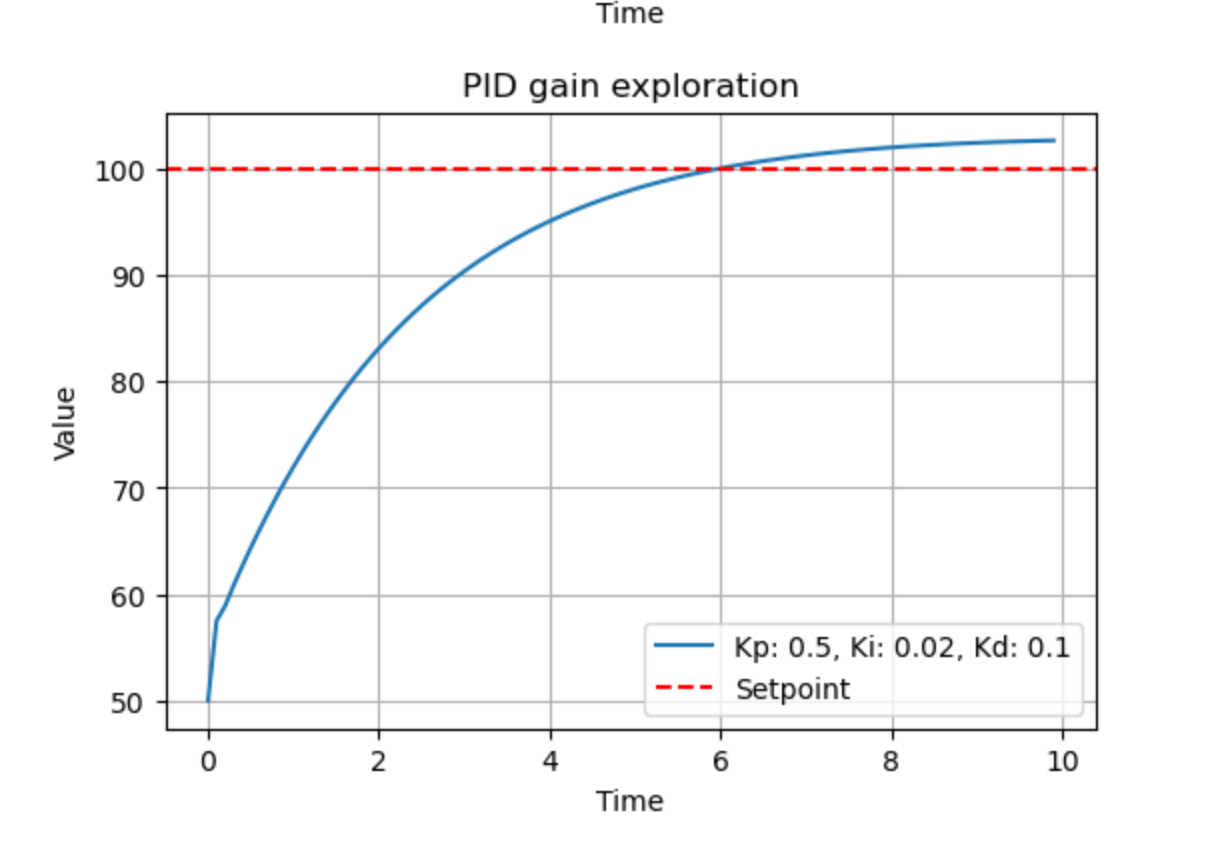
def explore_gain(kp, ki, kd):
time, values = pid_simulation(setpoint, initial_value, kp, ki, kd, time_steps, dt)
plt.figure(figsize=(6,4))
plt.plot(time, values, label = f"Kp: {kp}, Ki: {ki}, Kd: {kd}")
plt.axhline(y=setpoint, color = 'r', linestyle = '--', label = "Setpoint")
plt.xlabel('Time')
plt.ylabel('Value')
plt.title('PID gain exploration')
plt.legend()
plt.grid(True)
plt.show()
#Example of exploring gains.
explore_gain(1, 0, 0)
explore_gain(0, 0.05, 0)
explore_gain(0.6, 0, 0.2)
explore_gain(0.5, 0.02, 0.1)